세상은 평평하지 않습니다.
지형 인식은 카메라를 지면에서 일정한 거리로 유지하여 중첩도를 일정하게 유지합니다. 이는 울퉁불퉁한 지형에서 데이터 품질을 보장하고 일정한 지상 해상도를 유지하는 데 도움을 줍니다.
이 비디오는 Map Pilot Pro 앱에서 지형 인식 작동을 보여줍니다.
소개
비행 계획 전에 지형 정보를 다운로드함으로써 Map Pilot Pro는 지면 고도 변화를 고려하여 비행 경로를 설계합니다. 울퉁불퉁한 지형을 매핑하려 시도한 사람이라면 지형에 따라 고도 AGL이 변할 때 일정한 중첩도를 유지하는 것이 거의 불가능하다는 것을 알 것입니다. 일정한 중첩도는 일관된 GSD와 더 높은 품질의 지도 처리 결과로 이어집니다.
이는 센서 기반 솔루션이 아니며 모든 Map Pilot Pro 지원 항공기와 호환됩니다. 한 지역에 대해 지형 데이터를 다운로드하면 오프라인 비행 계획에도 사용할 수 있습니다.
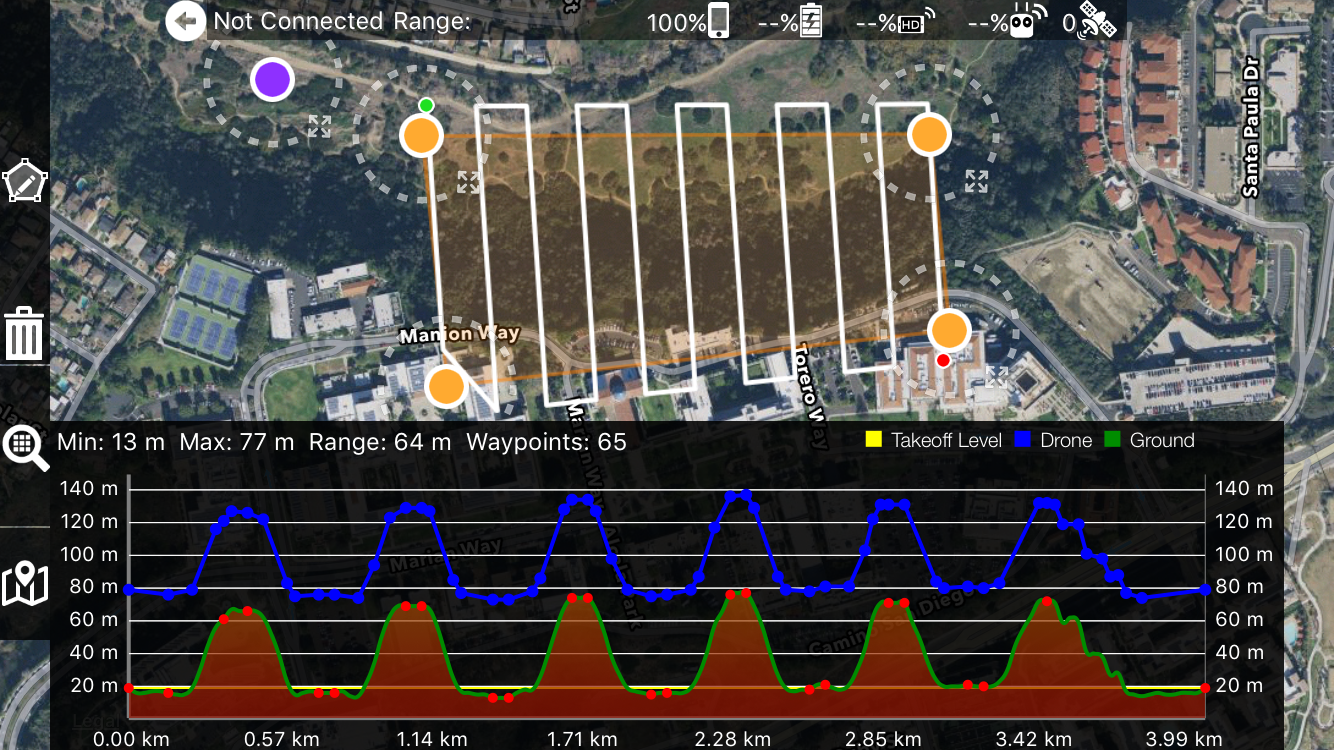
이 이미지는 협곡 바닥에서 이륙하도록 계획된 비행이 일정한 지상고 60미터를 유지하기 위해 협곡 벽을 오르내리는 모습을 보여줍니다.
이 비디오는 "평평한" 임무와 지형 인식 임무 간의 비교를 보여줍니다. (위 비디오와 동일한 임무는 아님)
내장된 지형 데이터 출처
Android 버전 1.4.0 및 iOS 버전 5.5.0부터 Map Pilot Pro는 선택할 수 있는 여러 내장 데이터 소스를 제공합니다. 자세한 내용은 여기를 참조하십시오:
https://support.dronesmadeeasy.com/hc/en-us/articles/14697118095380-Built-in-Terrain-Data-Sources
사용자 계정별 지형 데이터 출처
Map Pilot Pro는 Maps Made Easy를 사용한 지도 처리 중 생성된 DEM 또는 DEM 업로드를 사용할 수 있습니다. 자세한 내용은 여기를 참조하십시오:
주의 사항
이 새로운 기능에는 임무를 계획할 때 고려해야 할 몇 가지 사항이 있습니다. 항공기, DJI SDK, 소스 데이터 및 실제 장애물의 제한으로 인해 모든 지형 인식 비행은 이륙 전에 신중히 검토하고 확인해야 합니다.
귀환 기능(Return To Home) - 리모컨에서 RTH 버튼을 누르거나 귀환을 유발하는 다른 이벤트가 발생하면 항공기는 현재 설정된 귀환 고도가 현재 고도보다 높으면 상승한 후 이륙 위치로 직선으로 이동합니다. 예를 들어 산을 넘어 비행하여 반대편에서 현재 설정된 귀환 고도 근처에 있고 RTH 이벤트가 발생하면 항공기는 직선으로 이륙 위치로 돌아가 산과 충돌할 수 있습니다. 이는 시야 확보 요구 사항을 위반하므로 해서는 안 되지만 항공기를 그렇게 보낼 수는 있습니다.
이를 방지하기 위해 모든 지형 인식 비행은 현재 비행 경로에서 만난 최고 고도보다 60미터 더 높은 귀환 고도로 자동 조정됩니다(가능한 경우). 항공기가 이륙 위치 바로 옆에 있고 머리 위로 60미터만 높더라도 최고 지점보다 더 높이 상승한 후 귀환하여 하강합니다.
요약 - 산을 넘어 비행하지 마십시오. 귀환 기능은 이러한 상황에 맞게 설계되지 않았으며 Map Pilot Pro가 해결할 수 없습니다.
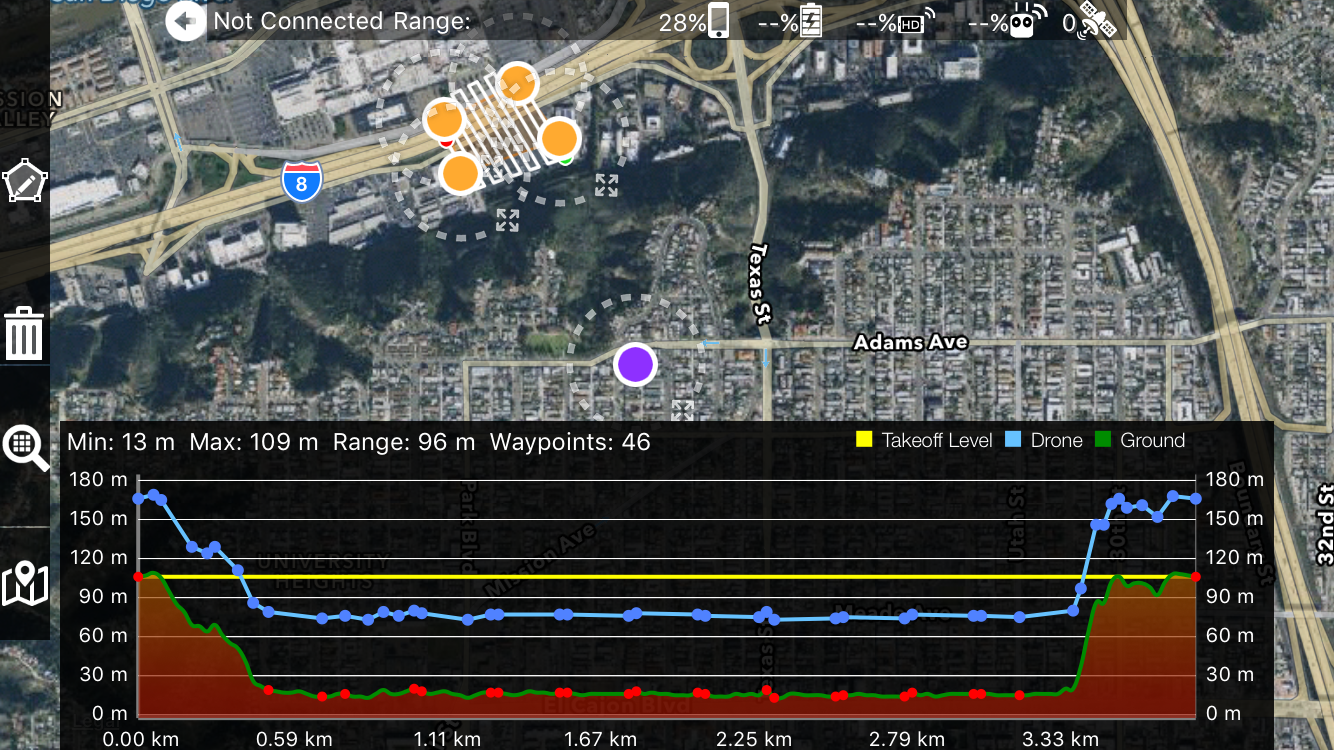
최대 비행 고도 - DJI는 이륙 지점을 기준으로 항공기의 최대 비행 고도를 500미터로 제한합니다. 고도 그래프에 경고 메시지와 함께 빨간 선이 나타나 500미터 한도를 초과하는 구간을 표시합니다. 빨간 선이 있으면 지형 조정 비행을 승인하거나 이륙할 수 없습니다.


최소 비행 고도 - 이륙 고도 이하에서 비행하면 안정적인 RC 연결 유지가 매우 어렵습니다. 경고 메시지가 표시되고 이륙 고도를 나타내는 노란 선이 그려집니다.

소스 데이터 한계 - 30미터 픽셀은 매우 큽니다. 이것이 사용 가능한 최고 해상도 고도 데이터입니다. 주변을 살펴보고 모든 것이 평평한 30미터 정사각형으로 변환된다고 상상해 보십시오. 데이터 손실이 분명히 있습니다.
수집 시기 - 이 데이터는 2000년에 수집되었습니다. 그 이전에 채광장이 파여 있으면 보일 수 있지만 그 이후에 만들어졌다면 나타나지 않습니다.
미반영 장애물 - 예를 들어 전신주 같은 것은 나타나지 않습니다. 고층 빌딩은 나타날 수 있으나 30미터 단위의 해상도 때문에 건물 높이 및 주변 지역의 정확도에 문제가 생깁니다. 수직 절벽면은 ±30미터 정도의 오차가 있을 수 있습니다. 이는 데이터 샘플 크기와 수집 방식 때문에 수직 특징이 잘 표현되지 않는 예입니다.
누락된 데이터 - 지원 지역의 99.9999999%는 잘 커버되어 있습니다. 데이터는 대부분 양호합니다. 레이더가 판독하지 못한 "공백" 지역이 있으며, 이는 NASA가 완전히 처리하지 않은 지역으로 주로 깊은 지형이나 빙하 지역입니다. 공백이 있을 경우 Map Pilot Pro는 마지막으로 알려진 정상 고도를 사용합니다. 이는 공백이 보통 항공기가 접근해서는 안 되는 깊은 곳에 발생하기 때문에 가장 안전한 방법입니다. 공백은 보통 작고 Map Pilot Pro는 고도를 과대평가하려 시도합니다.
비행 계획
지형 인식 계획 도구 사용법은 항공기 연결 여부와 상관없이 동일합니다. 비행 경로 정의는 항상 그렇듯 동일하지만 지형 인식 버튼을 누르면 주변 지역의 고도 타일을 다운로드하고 정의된 선 아래 지형을 기반으로 최적 비행 경로를 계산합니다. 계획된 비행이 여러 제한을 위반하거나 조정하고 싶으면 지형 인식 버튼을 다시 눌러 그래프를 숨기고 다시 눌러 재계산할 수 있습니다.
지형 인식 기능을 구매하지 않은 경우 지형 그래프 미리보기를 닫을 때 구매하라는 메시지가 표시됩니다. 실제 지형 조정 비행은 기능 구매 후에만 가능합니다.
참고: 지형 그래프가 표시된 상태에서 비행 계획을 변경해도 지형 계획에는 반영되지 않습니다.
비행 검토
고도 그래프를 터치하고 손가락으로 슬라이드하면 터치 위치에 해당하는 지도에 연한 파란 점이 표시됩니다. 이를 통해 의도된 비행 경로를 확인하고 그래프에 표시된 고도가 실제 지형과 일치하는지 검증할 수 있습니다.
비행 실행
비행 계획을 세우고 모든 것이 정상인지 검토한 후 업로드 버튼을 눌러 최종 비행 경로 계산 단계를 시작합니다. 지형 인식이 활성화되면 지형 조정 비행 실행 여부를 묻는 메시지가 나타납니다. "아니오"를 선택하면 지정된 고도에서 일반 평탄 비행이 프로그래밍됩니다. "예"를 선택하면 경로를 따라 최종 프로필 조회가 실행됩니다. 이후 사용자는 제안된 비행 프로필을 수락하거나 거부할 수 있습니다. 거부하면 추가 조정이 가능하며, 수락하면 비행 프로필이 항공기로 업로드됩니다. 지형 인식 비행은 평소와 같이 시작됩니다. 비행 중에도 지형 인식 버튼을 토글하여 그래프를 볼 수 있으며 숨기고 다시 표시해도 비행 중에 새 프로필 계산은 실행되지 않습니다. 주황색 수직선은 비행 경로 진행 상황과 항공기 위치(빨간 삼각형)의 현재 고도 정보를 표시합니다.
댓글