世界は平坦ではありません。
地形認識は、カメラを地面から一定の距離に保つことで、重なりを一定に保ちます。これにより、不均一な地形でも高品質なデータを確保し、一貫した地上解像度を維持します。
このビデオは、Map Pilot Proアプリにおける地形認識の動作を示しています。
はじめに
飛行計画の前に地形情報をダウンロードすることで、Map Pilot Proは地面の標高変化を考慮した飛行経路を設計します。起伏のある地形をマッピングしようとしたことがある人なら、地形に伴いAGL高度が変化すると重なりを一定に保つのがほぼ不可能であることを知っています。一定の重なりは、一定のGSDとより高品質なマップ処理結果につながります。
これはセンサーに基づくソリューションではなく、Map Pilot Proが対応するすべての機体で互換性があります。一度エリアの地形データをダウンロードすれば、オフラインでの飛行計画にも使用可能です。
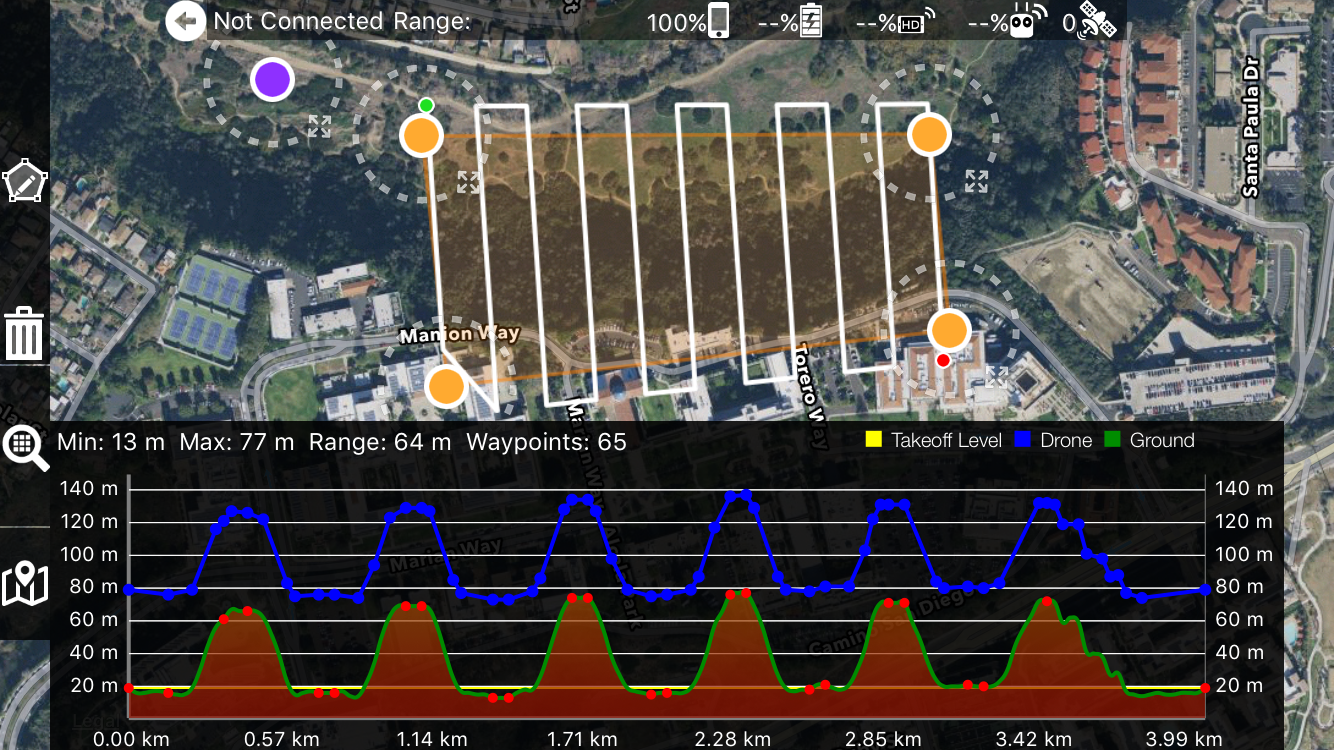
この画像は、峡谷の底から離陸する計画の飛行が、峡谷の壁を上下しながら地上60メートルの一定高度を維持する様子を示しています。
このビデオは、「平坦」ミッションと地形認識ミッションの比較を示しています。(上記のビデオとは別のミッションです)
内蔵の地形データソース
Android版1.4.0およびiOS版5.5.0以降、Map Pilot Proには複数の内蔵データソースが選択可能になりました。詳細は以下を参照してください:
https://support.dronesmadeeasy.com/hc/en-us/articles/14697118095380-Built-in-Terrain-Data-Sources
ユーザーアカウント固有の地形データソース
Map Pilot Proは、Maps Made Easyでのマップ処理中に作成されたDEMや、DEMのアップロードを使用できます。詳細は以下を参照してください:
考慮事項
この新機能には、ミッション計画時に考慮すべき点がいくつかあります。機体、DJI SDK、ソースデータ、実際の障害物の制限により、地形認識フライトは必ず慎重に確認し、離陸前に検証してください。
リターン・トゥ・ホーム(RTH) - リモコンのRTHボタンが押された場合や他のRTHをトリガーするイベントが発生すると、機体は現在設定されているRTH高度が現在の高度より高ければ上昇し、離陸地点へ直線で戻ります。ここで注意すべきは、例えば山を越えて飛行し、反対側で現在設定のRTH高度付近にいるときにRTHイベントが発生すると、機体は離陸地点へ直線で戻ろうとして山に衝突する可能性があることです。このような飛行は視線内飛行要件に違反するため推奨されませんが、機体をそこへ送ることは可能です。
これに対応するため、すべての地形認識フライトでは、RTH高度を現在の飛行経路で遭遇した最高高度より60メートル高く自動調整します(可能な場合)。たとえ機体が離陸地点のすぐ近くにいて頭上60メートルであっても、最高点より高く上昇してから帰還し降下します。
要約 - 山越えの飛行は避けてください。RTH機能はこのようなシナリオを想定して設計されておらず、Map Pilot Proでも対応できません。
最大飛行高度 - DJIは離陸地点からの飛行高度を500メートルに制限しています。500メートルを超えるエリアは警告メッセージと赤い線で高度プロットに表示されます。赤線が表示されている場合、地形調整飛行を承認して離陸することはできません。


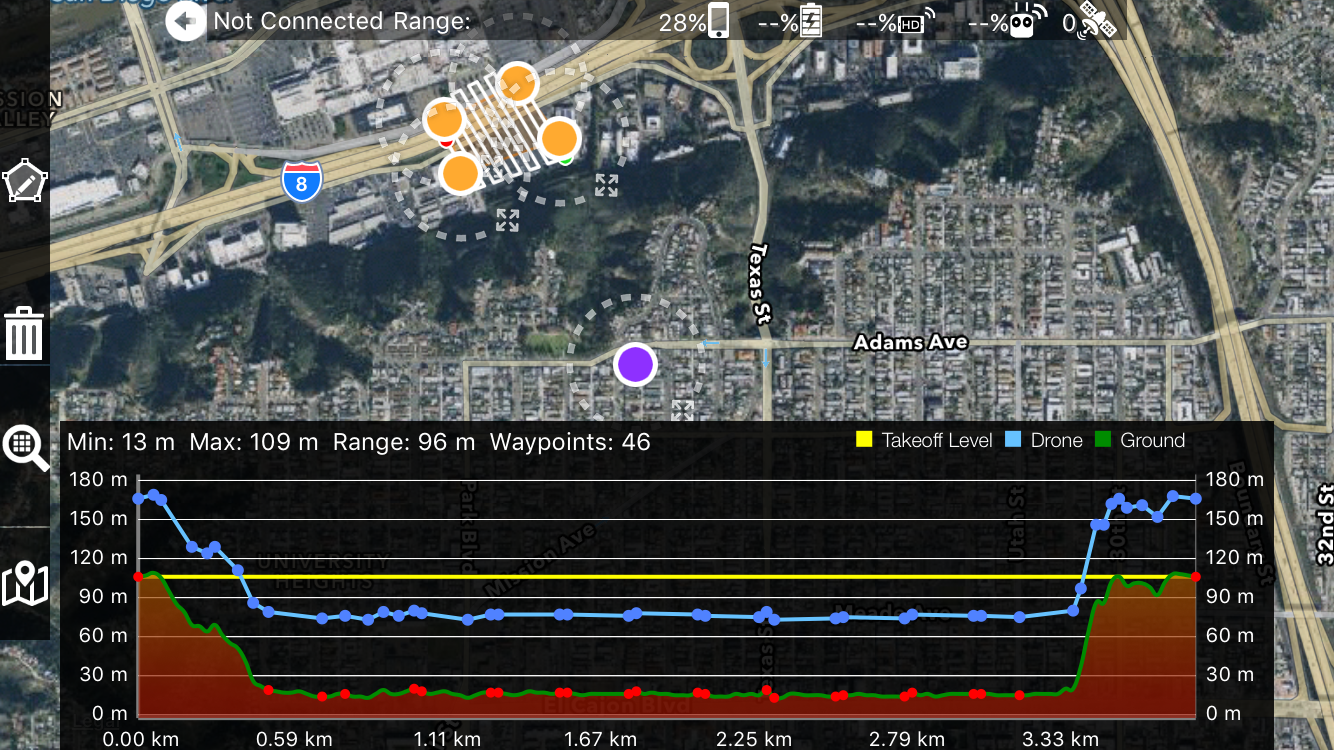
最低飛行高度 - 離陸高度以下の飛行は、安定したRCリンクの維持が非常に困難です。警告メッセージが表示され、離陸高度を示す黄色い線が描かれます。

ソースデータの制限 - 30メートルのピクセルは非常に大きいです。これは利用可能な最高解像度の標高データです。周囲を見渡し、すべてが30メートル角の平坦な四角形に変換されたと想像してください。データ損失は確実にあります。
収集日時 - このデータは2000年に収集されました。鉱山の採掘がそれ以前であれば反映されますが、それ以降であれば反映されません。
未反映の障害物 - 例えば電柱は表示されません。高層ビルは表示されるかもしれませんが、30メートルの粒度により建物の高さや周辺エリアの正確性に問題が生じます。垂直の崖面は±30メートルの誤差があります。これらはデータサンプルのサイズや収集方法により正確に表現されない垂直特徴の例です。
欠落データ - 対応エリアの99.9999999%は十分にカバーされています。データはほぼ良好です。ただし、レーダーが読み取りできなかった「空白」エリアがあります。これらはNASAによる処理が完全でないエリアで、深い地形や氷河に多いです。「空白」がある場合、Map Pilot Proは最後に検出された有効な標高を使用します。これはこれらの空白が通常、機体が行くべきでない深い場所に発生するため、安全な対応です。空白は通常小さく、Map Pilot Proは高度を過大評価しようとします。
飛行計画
地形認識計画ツールの使用は、機体に接続しているかどうかに関わらず同じです。飛行経路の定義は従来通りですが、地形認識ボタンをタップすると周囲の標高タイルをダウンロードし、定義されたラインの下の地形に基づいて最適な飛行経路を計算します。計画飛行が何らかの制限に違反する場合や調整したい場合は、再度地形認識ボタンをタップしてプロットを非表示にし、もう一度タップして再計算してください。
地形認識機能を購入していない場合は、地形プロットプレビューを閉じる際に購入を促されます。実際の地形調整飛行は機能購入後でないと利用できません。
注意:地形プロット表示中に飛行計画を変更しても、地形計画には反映されません。
飛行レビュー
標高プロット上で指をタッチしてスライドすると、対応する地図上の位置に薄い青色の点が描かれます。これにより、意図した飛行経路を確認し、プロットに表示されている標高が実際の地形と一致しているか検証できます。
飛行実行
飛行計画を立てて問題がないことを確認した後、アップロードボタンを押して最終的な飛行経路計算を開始します。地形認識が有効な場合、地形調整飛行を実行するかどうかの確認が表示されます。「いいえ」を選択すると指定高度で通常の平坦な飛行がプログラムされます。「はい」を選択すると経路に沿って最終的なプロファイル検索が実行されます。その後、提案された飛行プロファイルを承認または拒否できます。拒否するとさらに調整可能です。承認すると機体にアップロードされます。地形認識飛行は通常通り開始されます。飛行中は地形認識ボタンの切り替えでプロットを表示可能です。非表示・再表示しても飛行中に新たなプロファイル計算は行われません。オレンジの縦線は飛行経路の現在進行状況を示し、機体位置(赤い三角形)の現在の標高情報を表示します。
コメント