Users frequently ask about Map Pilot Pro's applicability in planning flights using DJI aircraft carrying LiDAR sensors. Since Map Pilot Pro is designed with aerial map data collection in mind it is optimized for workflows that are common for that task. We have not (yet) added support for any LiDAR units directly but that doesn't mean it isn't possible to do.
For photogrammetry data collection things are usually quoted in terms of overlap which will determine the spacing. 50% overlap would correspond to giving the processing system 4 looks at everything. 75% overlap would give 16 looks at everything. 80% would give 25 looks, and so on. Photogrammetry requires lots of views of the survey area in order to be able to provide a faithful reconstruction.
LiDAR does not require as much overlapping data and the pass spacing is usually quoted in meters by the manufacturer. In reality, they are just saying you need X% overlap.
The pass spacing of Map Pilot Pro flights is based on the camera's horizontal field of view (FOV) and flight altitude. Based on these we calculate a footprint of where the camera is looking on the ground. This footprint is used with the designated overlap to determine the distance between the passes. For example: if the image is 100 meters wide and we want 33% overlap we would space the passes at 67 meters. For pass spacing purposes the layout camera's FOV and the LiDAR sensor's FOV are equivalent which means we just need to approximate the LiDAR's FOV with some camera parameters that will let a user treat it like a camera.
Skip to the bottom if you just want the numbers and hate learning.
Samples of what a LiDAR manufacturer (GeoSlam) provides:

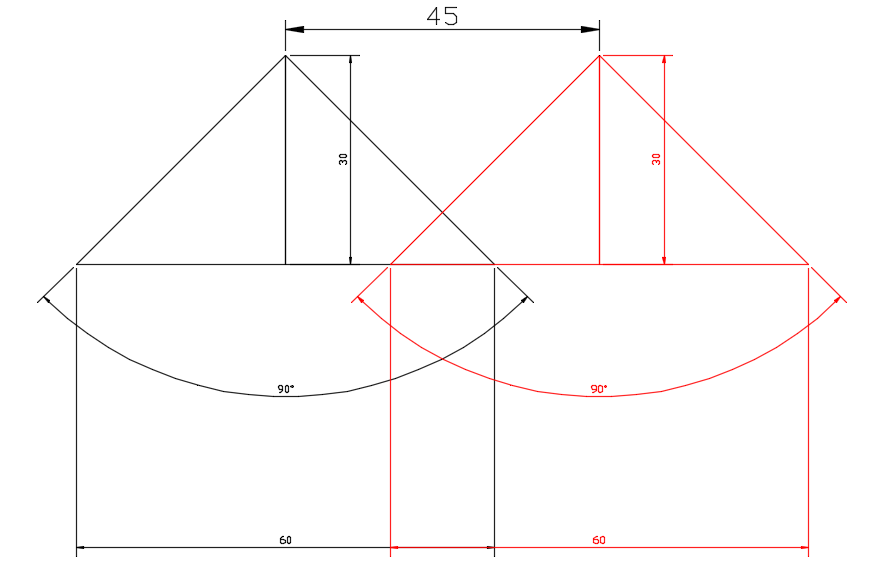
These diagrams show the following Manufacturer Recommendations:
- Field of View is 90 degrees
- Ground Swath is 60 meters
- Altitude is 30 meters
- Pass to Pass spacing is 30-45 meters
- Speed is 5 m/s
With a Ground Swath of 60 meters and a pass spacing of 30-45 meters, this manufacturer is saying to use between 25 and 50% overlap.
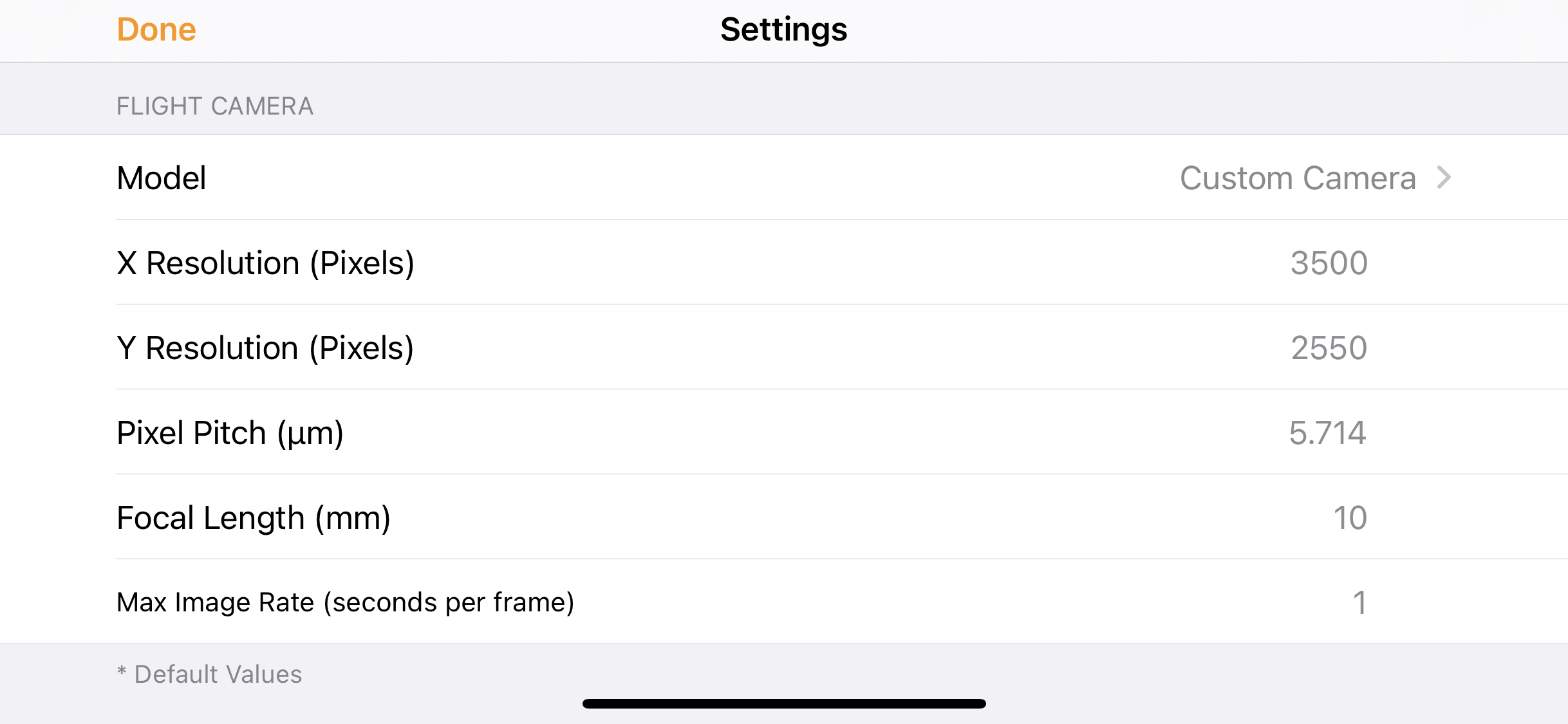
Map Pilot Pro has a 'Custom Camera' option when selecting the camera that will be used for planning a mission. This allows a user to define the following camera parameters for cameras that are not directly supported by Map Pilot Pro.
- X Resolution (pixels)
- Y Resolution (pixels)
- Pixel Pitch (µm)
- Focal Length (mm)
- Max Image Rate (seconds per frame)
The first four here are for determining the camera's FOV. The last one is for determining how fast you can fly with it. NOTE: Most of the aircraft that can carry a LiDAR sensor will require the user to be on at least a Pro level Maps Made Easy subscription in order to take off without a supported camera connected. The M300 requires an Elite subscription.
For LiDAR flight planning on DJI aircraft using Map Pilot Pro the goal is to determine a set of 'Custom Camera' parameters that will allow us to duplicate the Manufacturer Recommendations.
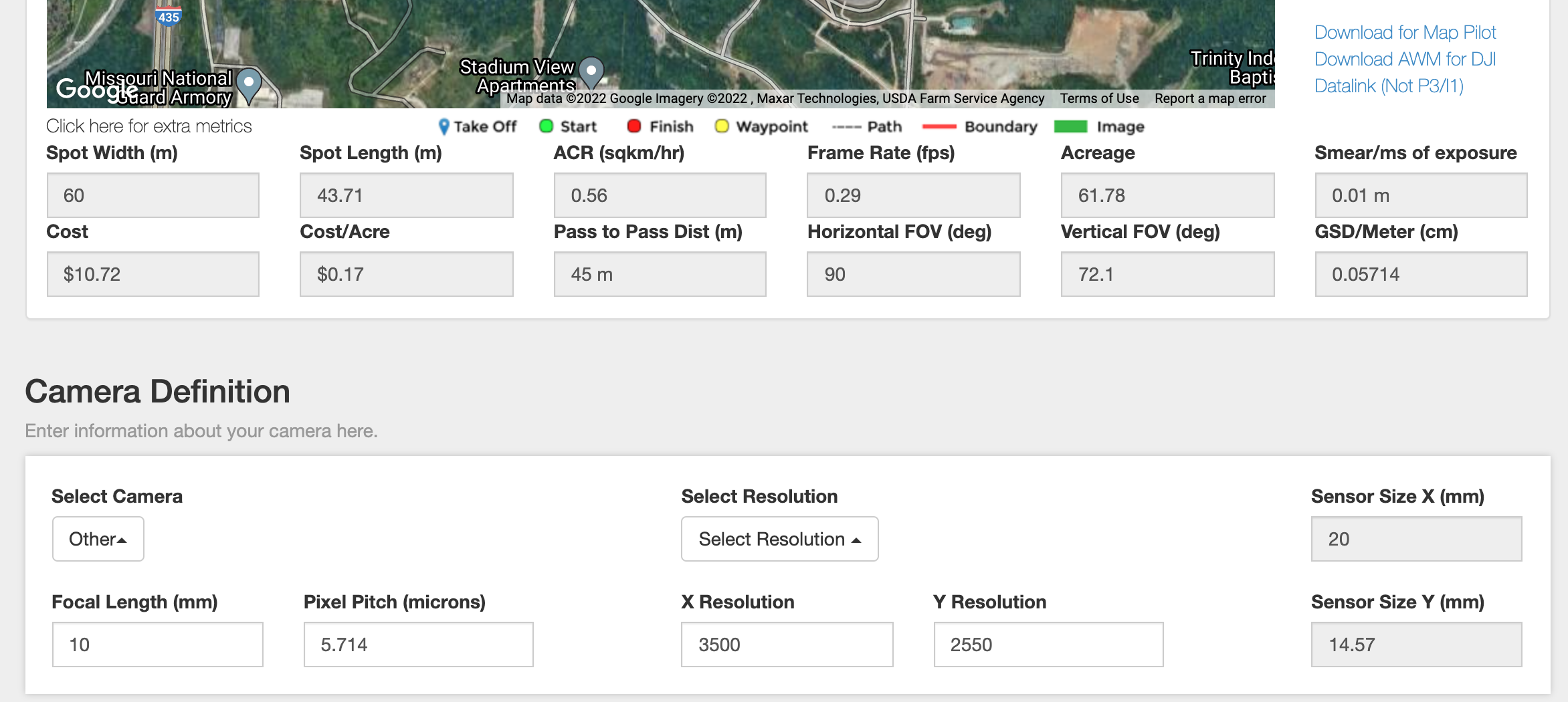
There is not really a good way to do this using Map Pilot Pro (yet) but users can use the Maps Made Easy Point Estimator to come up with usable numbers.
- In the 'Survey Area' section set the 'Pass Overlap' value to 25% (from above)
- In the 'Flight Specs' section set the 'Altitude AGL' to 30 m and the 'Speed' to 5 m/s
- Click on 'Click here for extra metrics' (small text on bottom left of map) to expand the readout
- In the Camera Definition section at the bottom select 'Other' for the camera.
- The 'X Resolution' should be set to 3500
- The 'Y Resolution' should be set to 2550
- For 'Focal Length' enter a value of 10 mm
- For 'Pixel Pitch' enter a value of 5.714 µm
Entering these values will give a simulated camera FOV that is equivalent to the Manufacturer Recommendations above. These steps show:
- 'Horizontal FOV' is 90 degrees
- 'Spot Width' which is equivalent to Swath Width is 60 meters given the 30 meter altitude
- 'Pass to Pass Dist' is 45 meters
With the camera properly simulated you can adjust the overlap as needed in the 'Survey Area' section of the Point Estimator or the Map Pilot Pro layout screen.
Setting the Max Image Rate to 1 second per frame will allow the aircraft to travel at any rate from the minimum speed of 2 m/s up to the max speed of 15 m/s.
'Custom Camera' parameters to simulate a 90 degree FOV camera in Map Pilot Pro for use with LiDAR sensors
Hi Zane.
I wanted to follow up on this LiDAR thread. We have used Map Pilot Pro to fly photogrammetric projects for while now and find it to be the most strait forward and easiest to use flight planning and execution software on the market. However, we have recently purchased a Matrice 300 RTK and LiDAR payload. I was wondering if your company was planning on expanding the software further in the LiDAR direction. Specifically, it would be nice if Map Pilot had pre-configurations for a drone and LiDAR payload combination that you can pick from. Another nice feature would be if it could perform an automatic figure 8 flight before and possibly after the mission for IMU calibration, similar to what UGCS offers. Is this something that Map Pilot will offer in a future release?
We will be adding support for the L1 camera in the next release. We are not currently planning on getting into LiDAR specific flight planning.
What a shame they don't plan to get into lidar topics, I am an MME user and I would love to be able to fly my lidar with your software since it is very simple and fulfills everything necessary for flights. There is so little left before they can preload LIDAR Sensors that I would ask them for that effort. Adding a figure 8 before the flight would be great and could be at the same height as the final flight. I use GEOSUN LIDAR GS100C+ and a Matrice 600 pro aircraft.
Javier: Lots of people fly the M300 with a LiDAR payload. That is what this article was written for. We will look into the figure 8 portion of the flight. What are the parameters of the Figure 8 you would like to see? Is there documentation somewhere for the best practices on it?
The figure of 8 is required to coordinate the LIDAR inertial system and the Drone's GNSS DATA. (the Lidar system likes movement in axes), for this reason figures of 8 are made at the beginning and every 2 km when it is a straight line. The Figure can be with a radius of 5 to 10 m and a maximum length of 30 m, it does not require more. I will send you a link with an example.