![]()
NOTE: This article is largely outdated. There are no special setup steps required for the newest aircraft aside from setting your preferred RTH height and other global settings.
When your drone comes stock from the factory, it is ALMOST ready to go. There are a few settings that are factory defaults that have to be selected in order to enable any 3rd Party app including Map Pilot.
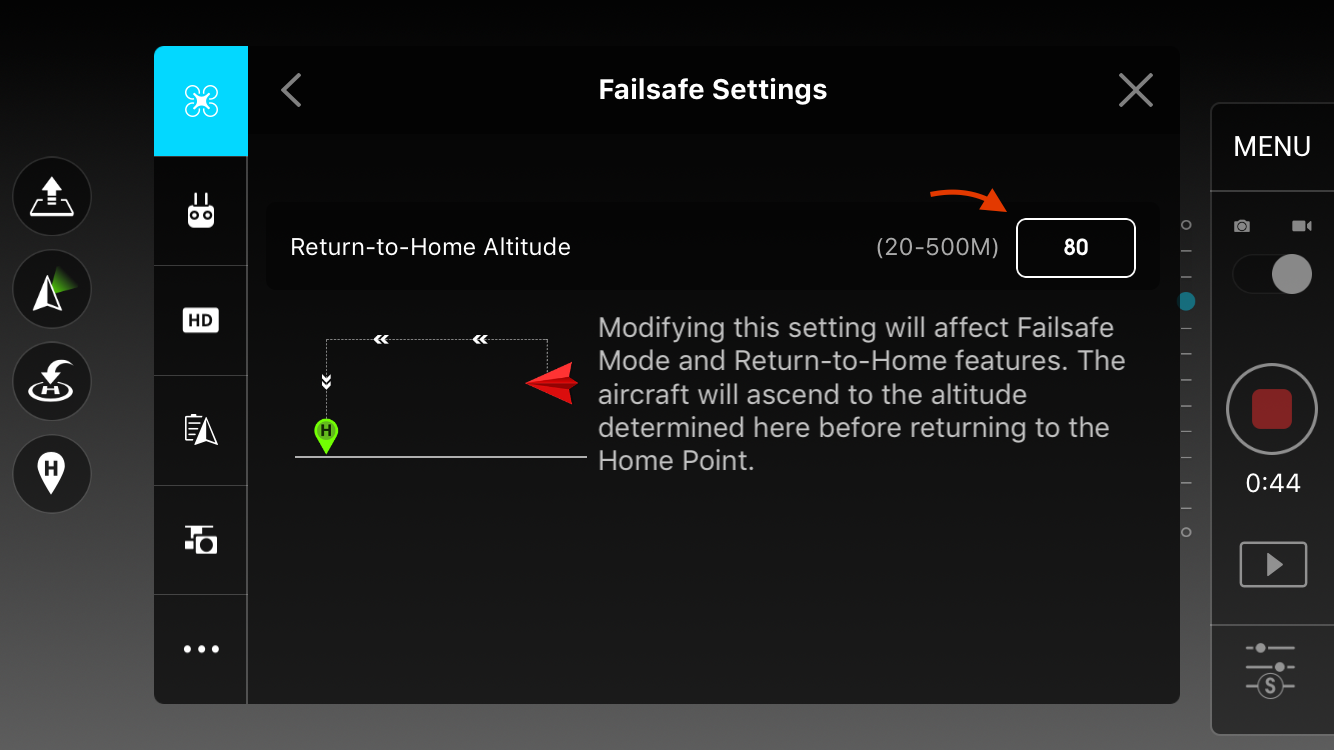
Most importantly SET THE RETURN TO HOME HEIGHT! By default it is set to 20 m is just high enough that you might clear a tree if you are lucky. We recommend setting it on the high side to reduce the chances of problems occurring.
DJI Phantom 3 and Inspire 1 allow for a few different flight modes, which can come in handy depending on the conditions or purpose of your flight. This article will go over how to activate Multiple Flight Modes, how to disable IOC, enable Smart Go Home and how to switch your remote's PAF (PSA) switch into the mode to use with Map Pilot. Each mode changes the characteristics of your controls while in flight. Out of the box, these extra features are disabled until you are ready for more advanced features. When trying out new flight modes for the first time, always practice in an open and clear field.
- Power on your DJI drone and launch the DJI GO app.
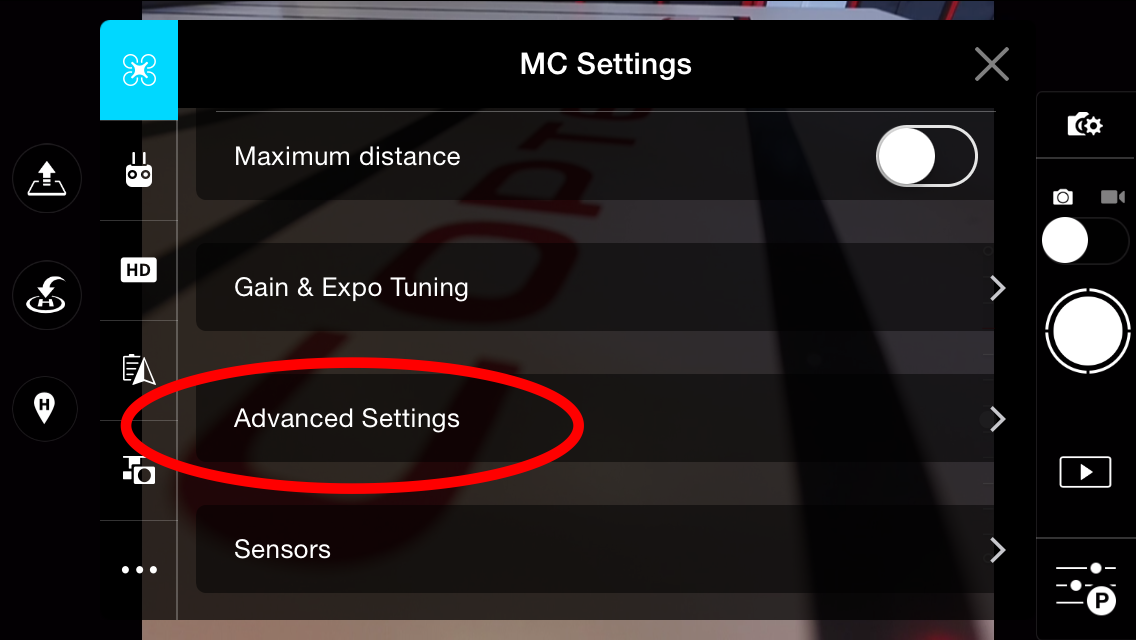
- Choose Enter Camera View and open the MC settings menu. You can find this menu on the top left corner of the screen, directly to the right of the Home icon.
- Scroll down, and open Advanced Settings.
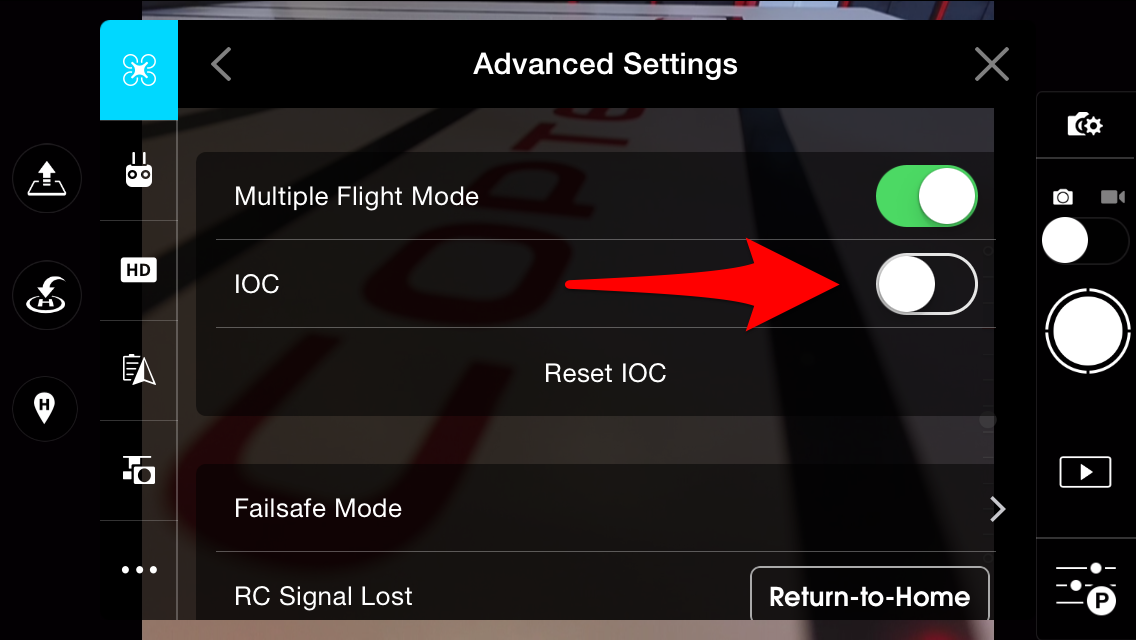
- Enable Multiple Flight Mode. You have now turned on advanced settings for flight mode options. You can now toggle through the different flight modes with the three-way switch on the top left of the controller above the gimbal wheel. Note: Always be aware of your flight mode before taking off. Make sure IOC is off.

- Make sure IOC is off.
- Under "Failsafe Mode" be sure to set the "Return-to-Home Altitude" to something reasonable. The default value of 20 meters is not reasonable.
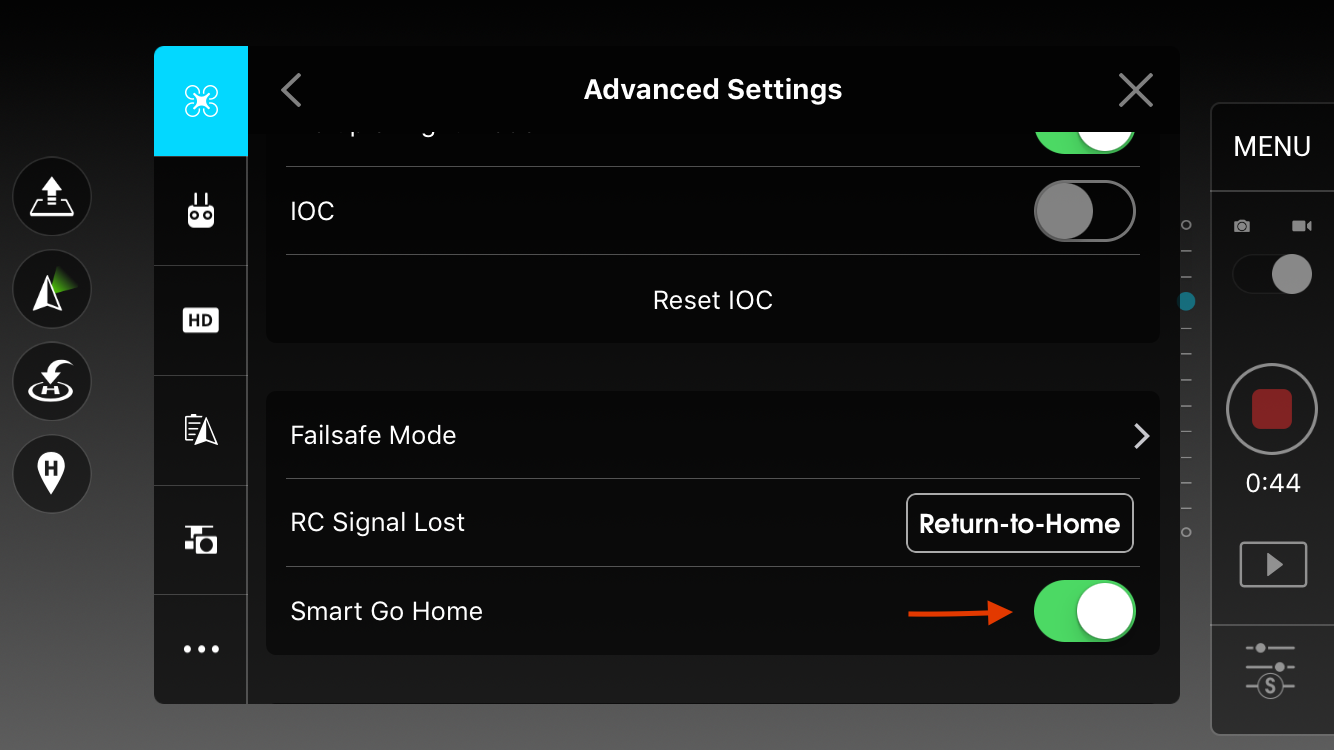
- Make sure "Smart Go Home" is enabled.
- Make sure the PAF switch in in the 'F' position. ('P' for Phantom 4)

-
While you are in there, turn off "Beginner Mode". We also recommend turning off the "maximum distance" limitation because the error codes for that seem to come and go with the different firmware versions and if you set a mission that goes outside of that area it can fail quietly and cause confusion.
Flight Modes
There are three options available, and each is denoted with a letter:
- “F-mode” (Function). This mode allows for third party app control for apps like Map Pilot. At any time, you can switch back to "P-Mode" and be back in control of the aircraft or just make it hover where it is.
- “P-mode” (Positioning). This mode works best with a strong GPS signal and will provide the most stable flight. "P-mode" allows the drone to maintain its position and altitude even in moderate wind. The drone also uses active braking in this mode to stop the drone when the stick inputs are released. There are three variations of “P-mode,” and these variations will automatically switch based on GPS strength.
- P-GPS: The aircraft is using GPS for positioning.
- P-Opti: Aircraft is using only Vision Positioning when there is insufficient GPS. Note: Vision Positioning is only available within 10 feet of the ground and does not work over moving surfaces such as water.
- P-Atti: Neither GPS or Vision positioning is available. The aircraft only uses its barometer to stabilize and to maintain altitude only.
- “A-mode” (Attitude). The GPS and Vision Positioning are not used in this mode. The aircraft will maintain altitude and stabilize using its barometer. In this mode wind will be a factor and the aircraft will have no active braking. This setting should only be used by experienced pilots.
Very good info
Any recommendations / optimum settings for the inspire 1 battery ?
I haven't tried with Inspire-2 yet, but does it work with?
Thanks for your answer.
What are the specific steps for the Mavic?
Much of this seems to be specific to the Phantom.
You don't really have to do anything specific for the Mavic. This article is largely outdated.
I got error Exited Programme Flights in both my Phantom 4 Pro V1 and V2. What could be wrong.
Error screenshot: https://ibb.co/Srt6LQW
YES "Exited Programme Flights" : got same problem on last flights
I found a solution : disable "Multiple flight mode" and no more this problem ;-)
I come back on this subject because i made many missions without this issue (with disable "Multiple flight mode" in DJIGO parameters) : so i was happy ;-)
BUT on my last mission the issue come again : i had to make 5 or 6 flights instead of 2 because the P4P stopped with "Exited Programme Flights" error
NOT GOOD AT ALL !
i have upload logs in airdata and you can see at 4mn21 : "mode changed to P-GPS" but i didn't touch anything (the remote is fixed on a photographic foot" !!!
Thanks