![]()
Map Pilot can be used to estimate a number of different metrics without being connected to the aircraft.
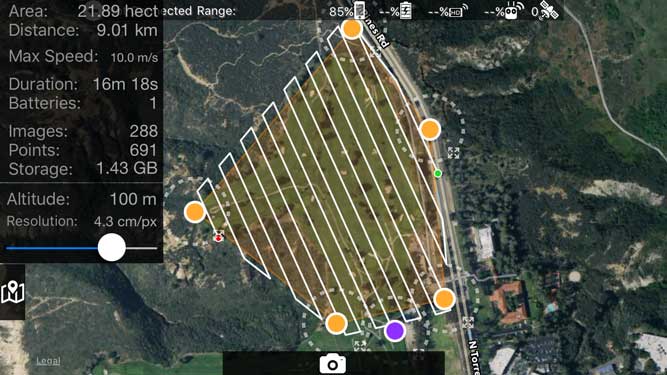
As the Boundary Markers and the Estimated Takeoff Point are added/relocated, the Flight Plan Statistics pullout menu shows the updated flight metrics such as area covered, distance flown, estimated flight time, number of batteries required and number of photos that will be taken.
The number of photos that will be taken directly translates into the number of points Maps Made Easy processing will require.
Adjusting the Altitude slider also affects the flight plan metrics.
Whether you plan on charging by the acre or by the image (like we do), using the Map Pilot app will make sure that you show up to the site properly equipped, with the data you need and a solid understanding of what your processing costs will be.
This walkthrough assumes that your device has a data connection but is not connected to the remote.
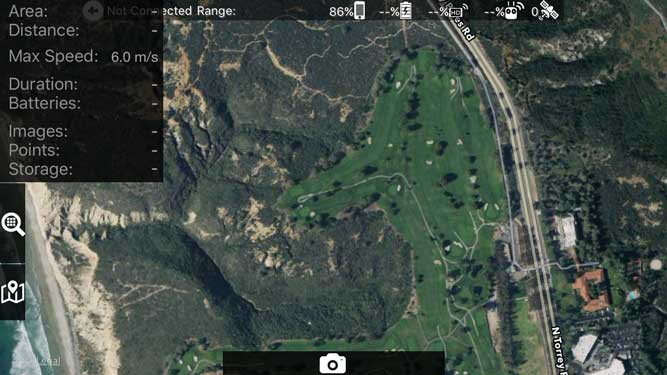
- Select "Create New Mission" on the Main Menu.

- Identify the Area of Interest.

- Open the Flight Plan Statistics pullout menu.
- Tap and hold to create Boundary Markers.
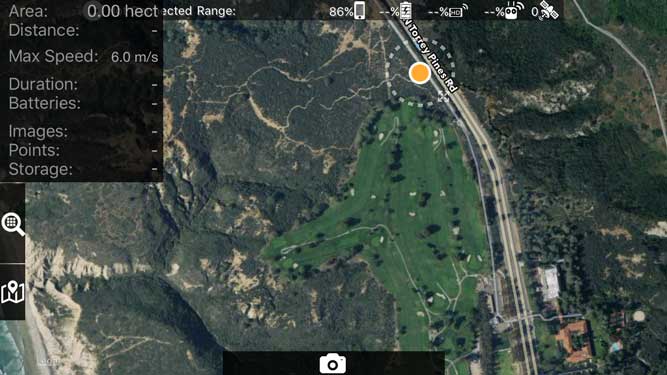 Boundary Markers can be tapped to be deleted or tapped and held to be moved.
Boundary Markers can be tapped to be deleted or tapped and held to be moved.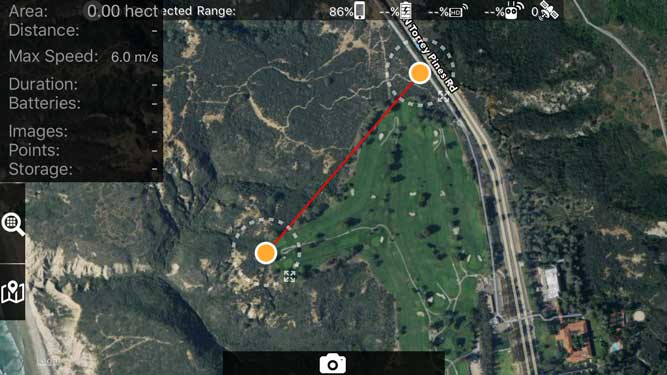 As Boundary Markers are added, the survey area boundary is drawn.
As Boundary Markers are added, the survey area boundary is drawn.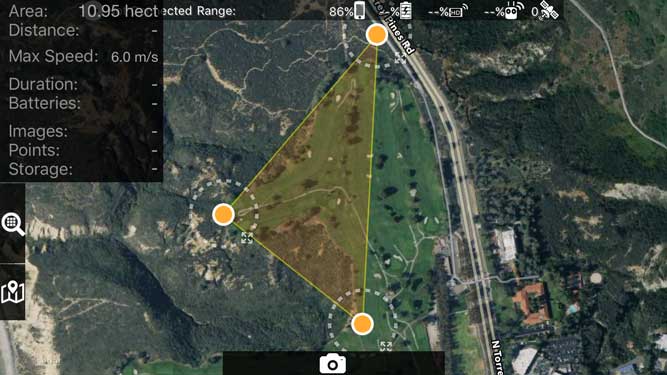 The shaded area shows the current survey area. The Flight Plan Statistics window is now being populated since there is valid data.
The shaded area shows the current survey area. The Flight Plan Statistics window is now being populated since there is valid data.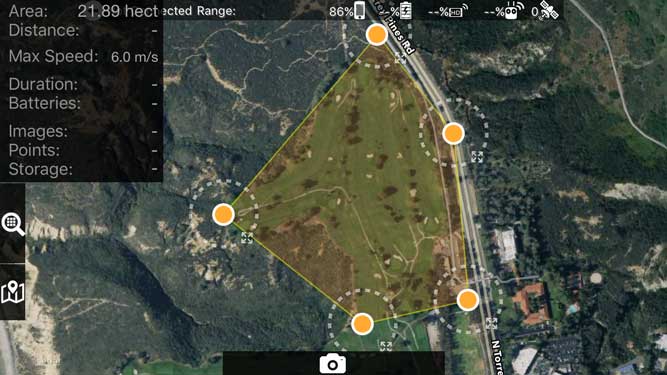
- Double Tap to add the Estimated Takeoff Location.
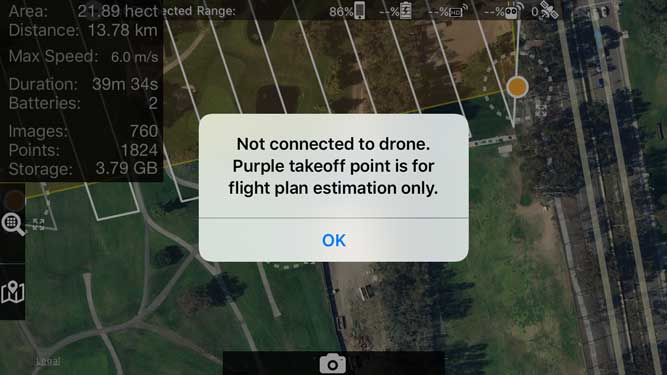 This is only valid when the iOS device is not connected to the drone. When connected, the drone's current location is used as the takeoff location.
This is only valid when the iOS device is not connected to the drone. When connected, the drone's current location is used as the takeoff location.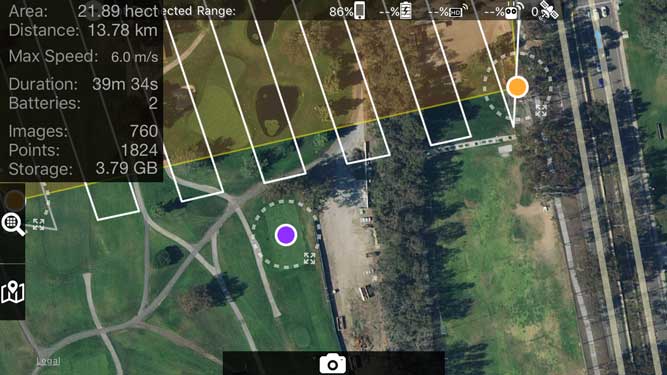
- Review the currently planned flight details and created flight path.Note that two batteries will be required to cover this area with these settings.
- Open the Altitude Adjustment pullout menu. It is currently set at 60 m (default).
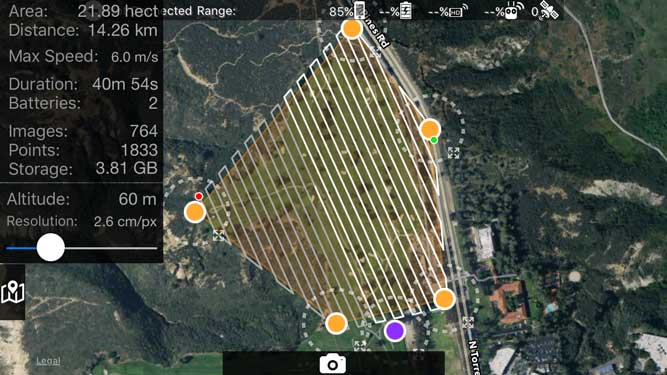
- Adjust the Altitude using the slider. Fine adjustments can be made by tapping on the left or right side of the slider.
- Review how adjusting the altitude affects the distance flown, number of images taken and number of batteries that will be required. Note that the number of required batteries went down to 1.
- Use a two finger rotate gesture to optimize the layout.
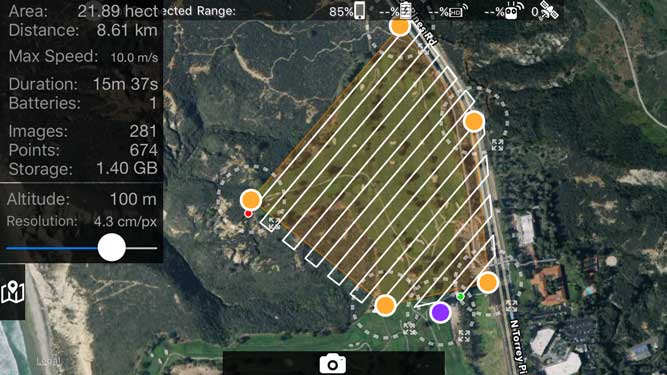
- Review the generated flight path for potential obstacles. The the flight path line alternates between white and gray to denote each estimated battery flight that will be required based on the current settings.
- Open the Map Control pullout menu and select the Save button if desired. This will allow for later repeated or offline execution of the plan.
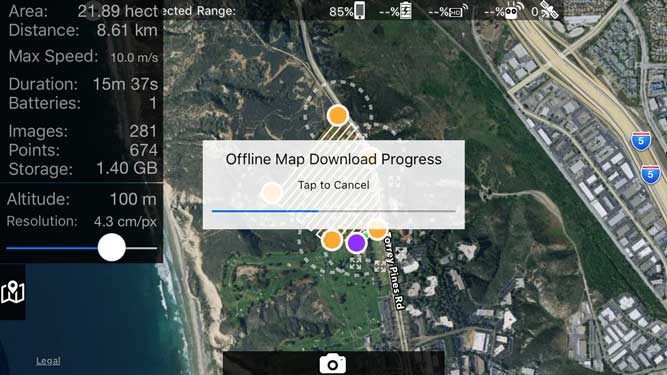
- When saving, the current overlap and battery limit timers are saved to be recalled along with the flight plan and cached map.

WARNING: Always inspect the intended flight path once on-site to be sure that real world obstacles are taken into account with any previously generated flight path.
Why can't we set flight over 120m?
When we set Image Overalp in the Setting, for example 80%, does this refer to forward or side overlap?
Two features requests:
(1): Higher flight attitude up to 500m because it's quicker to map big areas and keep good connection with RC in mountainous areas. Camera like Phantom 4 Pro will still produce good GSD at higher altitude than current 300m.
(2): Automatically create flight mission from KML file as it's more precise and easier than manually draw flight mission on top of imported KML file.
Big thanks if at least the first request feature is possible.
About the flight lines direction: can we have an option to set the direction of flight lines manually? Regardless of the takeoff position of the drone? This is important if one has terrain features with a preferred orientation (like a crest or a cliff) and wants to adjust the flight path as to optimize image collection. And a better way to create double-grid missions. (adding arrows in the flight line is a great way to show how the drone will be positioned while flying)
While we are here, being able to manually chose where the mission will start and end is a great option (so one can send the drone to start taking pictures in the far corner of the area, ending closer to the operator).
We had bad experience where we could not save Projects if our iPad did not have internet connection. Is this issue introduced in current version? Before it was just a warning and we could still save the mission. Please provide workaround as our project is in rural area with limited internet coverage.
I want to understand why capturing photos is stopping when the drone reaches half the line of a mission that is 2000m long???
Hhdronestecnologia: Please email for support since this is a bit off topic from the article.
I need to map about 70 linear vegetation transects (50 m length) spread throughout a large area. The goal is to replace “boots on the ground” traditional transect data collection with transects done via drone. Is there a way to either plan a single mission for multiple transects or plan each transect as a single mission, but fly multiple missions in a single flight without landing?